| "Vityaz-D" | |
|---|---|
| Historial de barcos | |
| estado del pabellón | |
| puerto base | presumiblemente basado en la Flota del Pacífico [1] |
| Estado moderno | operado |
| Premios y honores | el primer vehículo submarino no tripulado totalmente no tripulado en llegar al fondo de la Fosa de las Marianas [2] |
| Características principales | |
| tipo de barco | complejo robótico, vehículo de descenso en aguas profundas, estación de comunicación y navegación inferior [3] |
| Designación del proyecto | Vityaz-D [3] |
| desarrollador de proyectos | Oficina Central de Diseño "Rubin" , Fundación de Estudios Avanzados [3] |
| Jefe de diseño | Dmitri Semenov [4] |
| Profundidad máxima de inmersión | 12 mil metros [3] |
| Autonomía de navegación | Sí |
| Tripulación | 0 |
| Dimensiones | |
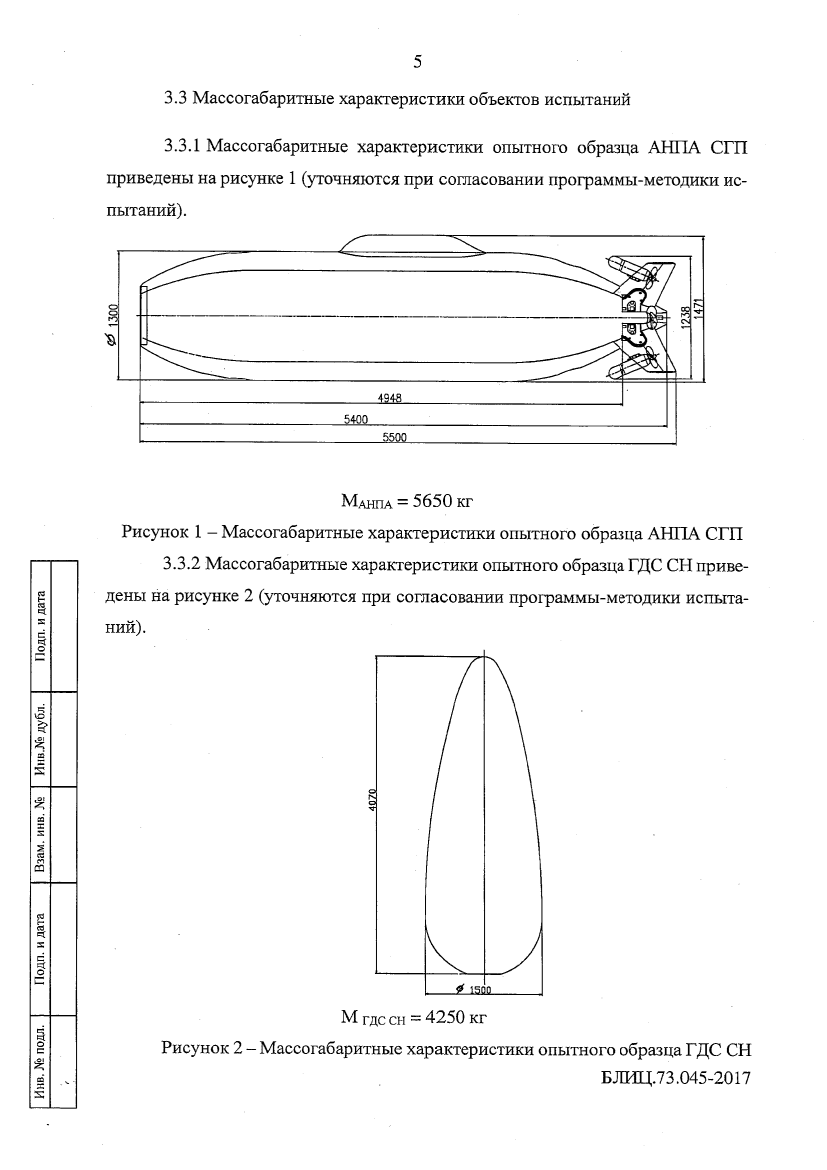
| Eslora máxima (según línea de flotación de diseño ) |
5,5 metros |
| Anchura del casco máx. | 1,3 metros |
| Altura | 1.471m |
| PowerPoint | |
| 4 propulsión y 10 propulsores | |
| Archivos multimedia en Wikimedia Commons | |
Vityaz-D es un vehículo submarino deshabitado autónomo ruso . El primer vehículo autónomo no tripulado del mundo que se sumergió hasta el fondo de la Fosa de las Marianas ( 11.022 metros de profundidad). Anteriormente, otros vehículos deshabitados (por ejemplo, el japonés " Kaiko " o el estadounidense " Nereus ") descendían al fondo de la Fosa de las Marianas , sin embargo, a diferencia del "Vityaz-D", no eran completamente autónomos [5] [2 ] .
El nombre del complejo robótico de aguas profundas "Vityaz-D" se le dio en memoria del buque de investigación soviético " Vityaz ", que en 1957 logró determinar la profundidad máxima de la Fosa de las Marianas: 11,022 metros [3] .
Rubin Central Design Bureau tiene proyectos diseñados para crear complejos robóticos (no tripulados) de exploración, perforación y producción de petróleo y gas bajo el agua (incluso bajo el hielo), incluidos módulos de energía y plataformas de transporte. Esta dirección es consistente con el programa estatal "Desarrollo socioeconómico de la zona ártica de la Federación Rusa para el período hasta 2025". . En este marco, se crearon una serie de dispositivos, como el "Clavicordio", capaz de operar a profundidades de hasta 6 mil metros, "Juno", "Amuleto" y otros, por ejemplo, un objetivo-simulador del submarino "Sustituto". Poco a poco, la Oficina Central de Diseño "Rubin" pasó a la creación de equipos para súper profundidades (hasta 12 mil metros) y se creó en la oficina el "Laboratorio de sistemas robóticos marinos" [6] . El primer complejo de este tipo fue Vityaz-D, que recibió su nombre en memoria del buque de investigación soviético Vityaz, que determinó por primera vez la profundidad máxima de la Fosa de las Marianas en 1957 . La "D" en el nombre indica la función del dispositivo como demostrador [3] .
Viktor Litvinenko se convirtió en el jefe del equipo del proyecto. Los participantes extranjeros no fueron invitados al proyecto, pero fueron informados sobre el trabajo en curso [3] . Rubin fue responsable del ciclo completo de creación del aparato: su diseño, fabricación y pruebas en aguas profundas en áreas remotas del Océano Pacífico [6] . En cooperación con Rubin, el Instituto de Investigación de Hidrocomunicaciones Shtil, el Centro Científico Estatal del Instituto Central de Investigación de Robótica y Cibernética Técnica , el Instituto de Problemas de Tecnología Marina de la Rama del Lejano Oriente de la Academia Rusa de Ciencias y otras organizaciones trabajaron en este proyecto [6] .
Originalmente se planeó que el ensamblaje del aparato se completaría en enero-febrero de 2018, en la primavera de 2019 se realizaron pruebas de fábrica en el área de Kronstadt , se concibió la primera prueba en el Mar Negro , y para verano-otoño la transición a las pruebas en el Océano Pacífico , donde los creadores planearon que el dispositivo llegara en el otoño de 2019 [3] .
Rubin Central Design Bureau, en su informe anual de 2015, anunció el proyecto desarrollado del sumergible de aguas profundas Vityaz, diseñado para realizar trabajos de investigación a una profundidad de 11,000 metros. Durante el trabajo en 2017, Rubin Central Design Bureau solicitó la fabricación y el suministro de un sistema especial de iluminación exterior para el sumergible de aguas profundas Vityaz-D, cuyo precio máximo de contrato fue de 15 millones de rublos [7] .
La ceremonia de colocación de la quilla del sumergible Vityaz-D en la grada de montaje de la producción experimental tuvo lugar el 30 de noviembre de 2018 [7] . El proyecto Vityaz-D se presentó por primera vez abiertamente en el Foro Económico Oriental [3] .
El aparato Vityaz-D es capaz de operar de forma autónoma sin control externo, incluso en presencia de obstáculos [6] . El proyecto implica la posibilidad de una inmersión máxima a 12.000 metros. A pesar de la profundidad máxima conocida de la Fosa de las Marianas, se planea la exploración de áreas desconocidas en el área del " Challenger Spot ". Solo unas pocas personas se han sumergido en este lugar y su profundidad, y ningún país ha realizado estudios a gran escala. La tarea del dispositivo era estudiar el área dentro de un radio de 150 kilómetros, donde se desconoce la profundidad [3] .
El complejo Vityaz-D, además de un vehículo de descenso deshabitado autónomo autónomo en aguas profundas, incluye una estación inferior de comunicación y navegación, y equipo de sala de control. Durante el funcionamiento del aparato, se intercambia información entre el dron y la embarcación de transporte a través de un canal hidroacústico en tiempo real [5] . El aparato de maniobra es una estructura permeable de flotabilidad nula , sus bases de potencia están fabricadas en aleaciones de titanio. Los contornos exteriores están hechos de esferoplástico , lo que permitió compensar el exceso de peso del aparato y darle una forma aerodinámica. Para el movimiento, el dispositivo utiliza cuatro motores eléctricos de marcha y diez propulsores [6] .
El equipo Vityaz-D incluye ecosondas , ayudas hidroacústicas para la navegación y la comunicación, sonar de barrido lateral , cámaras de video externas, dispositivos de iluminación y equipo especial de investigación. Esto hace posible realizar levantamientos de prospección-búsqueda y batimétricos a determinadas profundidades, realizar muestreos de la capa superior del suelo del fondo, levantamientos con sonar de la topografía del fondo y medir los parámetros hidrofísicos del medio marino [6] .
La principal ventaja del vehículo submarino es realizar investigaciones científicas en áreas de aguas profundas de un área grande [7] . El sistema de control utiliza elementos de inteligencia artificial [8], lo que permite que el dispositivo evite obstáculos de forma independiente, salga de un espacio limitado y resuelva otras tareas de maniobra. Esta es su diferencia con otros dispositivos que anteriormente se sumergieron en la Fosa de las Marianas. Es la autonomía del aparato ruso lo que lo distingue del estadounidense " Nerei " y del japonés " Kaiko " que se había sumergido previamente en la Fosa de las Marianas [2] [6] .
La masa del aparato es de 5650 kg. El dispositivo tiene la forma de un torpedo. Diámetro - 1,3 m, altura - 1,471 m, longitud - 5,5 m [9] . El dispositivo es capaz de soportar presiones de hasta 1000 atmósferas [8] .
El 8 de mayo de 2020 se sumergió una estación de fondo de aguas profundas, que tiene una conexión por cable con el barco. Después de eso, desde el tablero del buque de rescate de la Flota del Pacífico " Fotiy Krylov ", el aparato autónomo deshabitado "Vityaz-D" comenzó a sumergirse en la Fosa de las Marianas. El 8 de mayo, a las 22:34 hora de Moscú, tocó fondo, y durante el estudio se registró una profundidad de 10.028 metros [6] [10] [5] . Durante esta inmersión, el dispositivo estuvo en el fondo durante más de 3 horas, donde realizó mapeo de superficie, toma de fotografías y videos del fondo marino, obtuvo los parámetros del medio marino e instaló un banderín en el fondo de la Fosa de las Marianas en honor del 75 aniversario de la victoria en la Gran Guerra Patria [2] [1] [5] .
Se planean varios experimentos como parte del proyecto, y la inmersión del 8 de mayo fue la primera etapa de esta serie. Una de las tareas era comprobar las soluciones elegidas por los diseñadores [2] .
{kind=link}